
Po co nam roboty w kosmosie? Do zastąpienia człowieka w nużących, męczących czy niebezpiecznych zadaniach. Nie jest to jednak jedyne uzasadnienie wykorzystania robotów w kosmosie — roboty w kosmicznym środowisku rzutują na wpływ człowieka tam, gdzie ludzie nie mogą jeszcze dotrzeć. Łaziki planetarne są wyjątkowo przydatne w prawie wszystkich typach misji planetarnych na planetach o stałych powierzchniach, od małych ciał, takich jak asteroidy i komety, przez księżyce gazowych gigantów i naszą własną Ziemię, po planety typu ziemskiego, takie jak Mars.
Autor: Kajetan Gudowski
Robotyka Planetarna
Robotyka planetarna jest związana z działalnością pojazdów kosmicznych, takich jak: łaziki, lądowniki oraz sondy, których prace są eksploracją innych planet lub asteroid. Ta interdyscyplinarna dziedzina jest ściśle związana zagadnieniami, takimi jak: autonomiczne przemieszczanie się po nieznanym i innym miejscu i pokonywaniem naszej lokalizacji, systemy czujników i urządzeń, komponentów, koncesów obsługi i infrastruktury, obsługi koncepcji robotycznych do eksploracji, mikropenetracji, nanołaziki, także mechanizmów i penetracji podpowierzchniowych oraz urządzeń do pobierania, transportu i pobierania materiałów[1].
Czym jest łazik planetarny?
Łazik planetarny jest to poruszające się urządzenie służące do eksploracji księżyców i planet Układu Słonecznego. Dzisiejsi robotyczni nomadzi przemierzający obce ciała niebieskie i odkrywający sekrety kosmosu przemieszczają się autonomicznie dzięki rozwojowi oprogramowania do nawigacji i autonomicznego sterowania. Łaziki planetarne starszej daty, takie jak Łunochod ZSRR czy też Sojourner działający w ramach misji Mars Pathfinder, były sterowane przez operatorów z Ziemi.
Łaziki planetarne mają kilka zalet w porównaniu z lądownikami, które są nieruchome — mogą eksplorować większy obszar i mogą być kierowane do eksploracji interesujących cech powierzchni, które pojawiają się na ich drodze. Jeśli ich baterie są zasilane przez panele słoneczne, można je ustawić tak, aby zebrać jak najwięcej światła w miesiącach zimowych, gdy Słońce znajduje się nisko nad horyzontem. Każdy łazik musi być przynajmniej częściowo autonomiczny, ponieważ sygnały radiowe poruszają się z prędkością światła, więc potrzebują czasu, aby dotrzeć od kontrolera z Ziemi do łazika.
Zaletą łazika w porównaniu z orbiterami (pojazdami badającymi ciało niebieskie z orbity ) jest to, że może badać powierzchnię ciała niebieskiego do poziomu mikroskopijnego i może przeprowadzać eksperymenty fizyczne (instrumenty łazika są w kontakcie z powierzchni, dzięki czemu możliwe jest bardziej szczegółowe zbadanie na różne sposoby). Z drugiej strony łaziki mają wadę w porównaniu z orbiterami, ponieważ są bardziej podatne na awarie, z powodu lądowania i innych występujących zagrożeń, i mogą badać stosunkowo niewielki obszar ciała niebieskiego wokół samego miejsca lądowania, podczas gdy orbitery mogą „zobaczyć” całość z powierzchnią swoich instrumentów z orbity [8].
- • niekorzystny teren charakteryzujący się skałami, klifami, szczelinami itp. z niewielką liczbą cech dla samo lokalizacji;
- brak a priori danych dotyczących konkretnych cech tego środowiska, które należy zbadać;
- rozbudowany czas lotu sygnału i ograniczone okna komunikacji z Ziemią sugerując potrzebę wysokiego stopnia autonomii;
- nieprzyjazne warunki otoczenia, w tym ekstremalne temperatury i środowiska pyłowe;
- ograniczona dostępność mocy;
- wymagania wysokiej niezawodności, które ograniczają złożoność mechaniczną.
Pierwsze łaziki
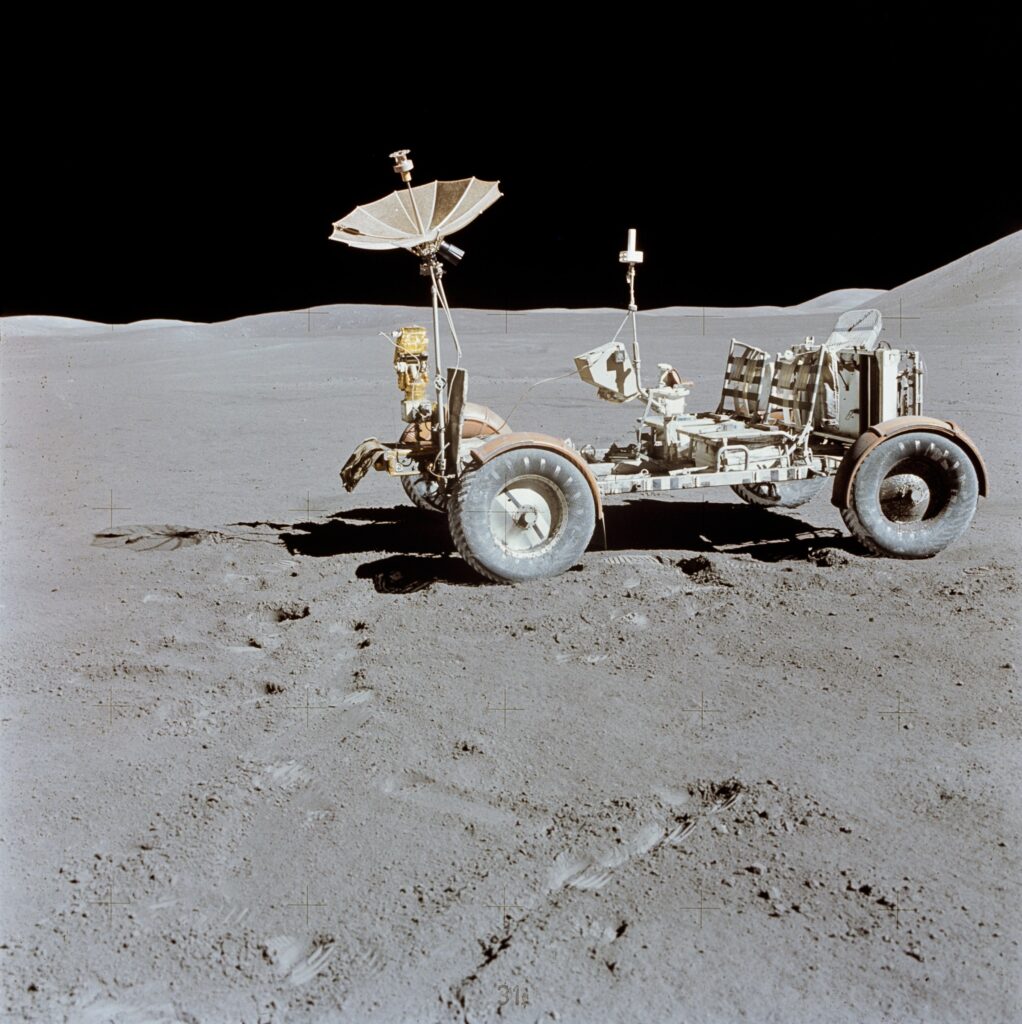
Wielki skok dla ludzkość, ale jeszcze większy dla robotyki. Większość osób łaziki zna oraz kojarzy z Marsem ale pierwszym robotem który miał wylądować na Księżycu, był radziecki Łunochod, określany mianem jako „łazik zero”. Niestety, nie dotarł na miejsce, ponieważ uległ zniszczeniu podczas nieudanego startu, do którego doszło 19 lutego 1969 roku. Łunochod 1 (rys.1) już jednak dotarł na powierzchnie Srebrnego Globu w listopadzie 1970 roku. Misja tego radzieckiego robota miała trwać tylko 3 dni a pracował aż przez 11 miesięcy. Innym typem księżycowego łazika jest LRV, czyli Lunar Roving Vehicle (rys. 2) używany w trakcie trzech ostatnich misji programu Apollo (Apollo 15, 16 i 17) do transportowania sprzętu oraz samych astronautów. Projektantem LRV był Mieczysław Bekker polski inżynier oraz żołnierz, absolwent Politechniki Warszawskiej.

Początki eksploracji Czerwonej Planety
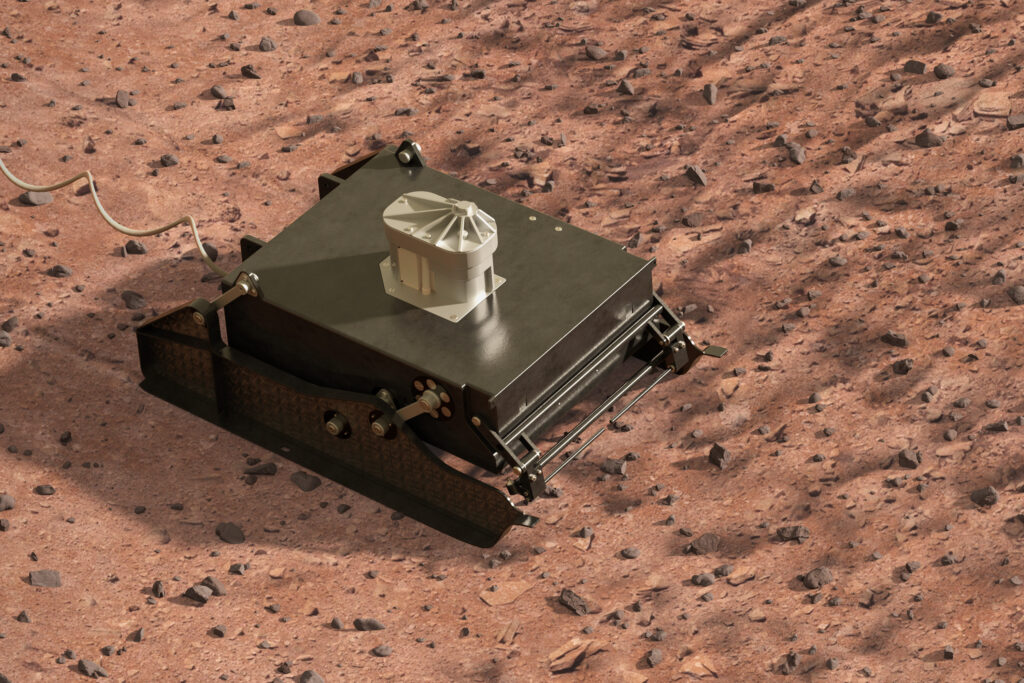
Wszystkie dotychczasowe misje łazików planetarnych przyjęły konstrukcje podwozi kołowych w różnych rozmiarach łazików, aby zapewnić prostotę mechaniczną i wysoką niezawodność. Wydaje się, że trend ten utrzyma się w dającej się przewidzieć przyszłości. Jedynym wyjątkiem był pierwszy łazik, który bezpiecznie dotarł na powierzchnię Marsa, mowa tu o nanołazik Prop-M (rys. 3) na rosyjskim lądowniku Mars 3 który wylądował w grudniu 1971. 4,5 kg Prop-M był połączony 15-metrowym przewodem z lądownikiem, używał pary nart zamontowanych na nogach dzięki którym miał „chodzić” a nie jeździć tak jak inne roboty tego typu. Niestety misja nie powiodła się po udanym lądowaniu, kontakt z lądownikiem został stracony w kilkanaście sekund po lądowaniu a łazik już później już nigdy nie został użyty [8].
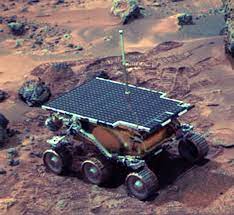
Niewątpliwie Związek Radziecki dotarł jako pierwszy na Marsa ale to Stanom Zjednoczonym udało się wysłać pierwszą udaną misję wykorzystującą samobieżny pojazd na innej planecie. Misja Mars Pathfinder bo o niej mowa miała na pokładzie łazik Sojourner (rys. 4) który był zasilany przez panele słoneczne. Przesłał on na Ziemię 550 zdjęć i dokonał 15 analiz składu chemicznego skał [2, 8].
Marsjańscy bliźniacy
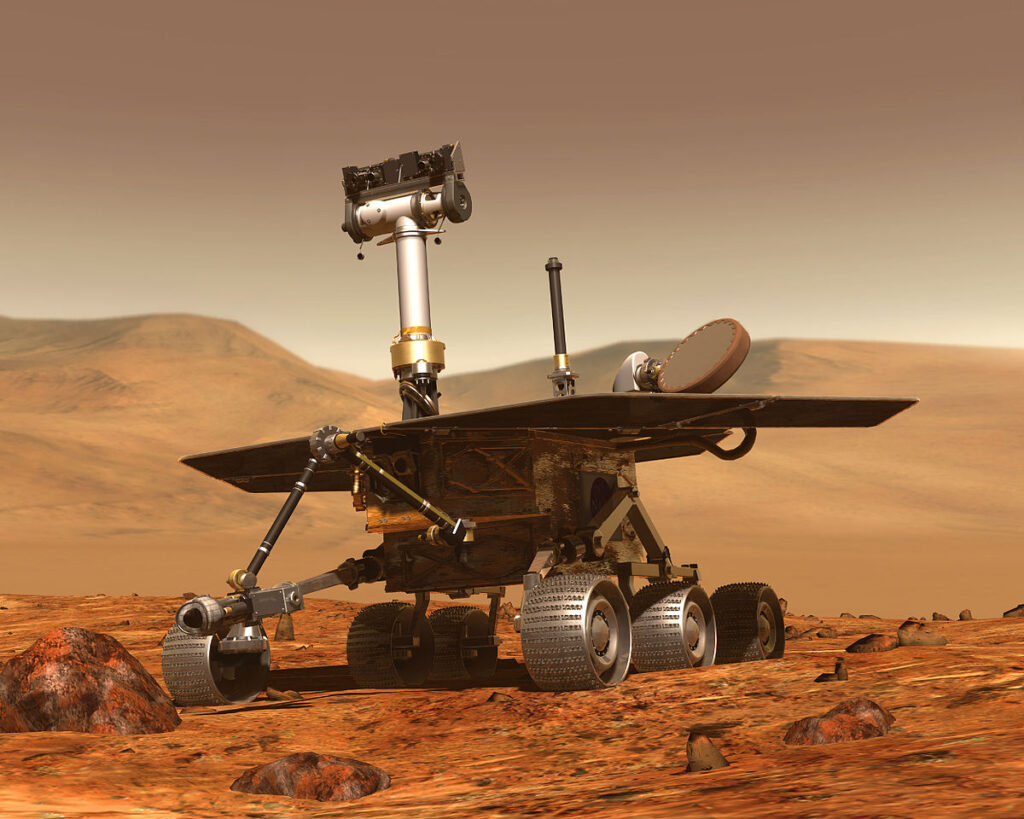
Misja MER czyli Mars Exploration Rover była podwójną misją NASA która obejmowała dwa bliźniaczo podobne łaziki Spirit oraz Opportunity. Celem misji było poznanie historii geologicznej i klimatycznej Marsa. Pozwoliło to na stwierdzenie, czy na Marsie występuje woda, czy istniały tam kiedykolwiek warunki umożliwiające powstanie życia.
Nasi bliźniacy zostali rozdzieleni, łaziki były nakierowane na miejsca po przeciwnych stronach Marsa, które wyglądały, jakby w przeszłości były dotknięte wodą w stanie ciekłym. Spirit wylądował w kraterze Gusiew, prawdopodobnie dawnym jeziorze w gigantycznym kraterze uderzeniowym. Opportunity wylądował na Meridiani Planum, miejscu, gdzie złoża minerałów sugerowały, że Mars miał mokrą historię.
Dzięki danym z łazików naukowcy z misji zrekonstruowali starożytną przeszłość, kiedy Mars był zalany wodą. Zarówno Spirit, jak i Opportunity znalazły dowody na przeszłe mokre warunki, które prawdopodobnie mogły wspierać życie drobnoustrojów. Badanie Opportunity nad kraterami „Eagle” i „Endurance” ujawniło dowody na istnienie w przeszłości jezior między wydmowych, które wyparowały, tworząc bogate w siarczany piaski. Piaski zostały przerobione przez wodę i wiatr, zestalone w skałę i przesiąknięte wodą gruntową.
Podczas gdy początkowe podróże Spirita w kraterze Gusiewa ujawniły bardziej bazaltowe otoczenie, po dotarciu do „Columbia Hills” łazik znalazł różne skały, co wskazuje, że wczesny Mars charakteryzował się uderzeniami, wybuchowym wulkanizmem i wodą podpowierzchniową. Niezwykle jasne plamy gleby okazały się wyjątkowo słone i dotknięte wodą z przeszłości. Na „Home Plate”, kolistym elemencie „Inner Basin” „Columbia Hills”, Spirit odkrył drobno warstwowe skały, które są równie przekonujące pod względem geologicznym, jak te znalezione przez Opportunity.
Oba łaziki przekroczyły planowany 90-dniowy czas trwania misji o wiele lat. Spirit działał 20 razy dłużej niż jego pierwotny projekt, aż do ostatecznego przekazania go na Ziemię 22 marca 2010 roku. Opportunity nadal działa ponad dekadę po wystrzeleniu. W 2015 roku Opportunity pobiło rekord podróży pozaziemskich, pokonując dystans ponad 42-kilometrowy maraton. Opportunity ma jeszcze jeden pobity rekord a mianowicie czas działania, jego misja zakończyła się 13 lutego 2019 roku, po ostatniej, nieudanej próbie komunikacji z łazikiem. Wcześniejszym rekordzistą był radziecki łazik Łunochod 1 którego rekord nie został pobity przez 30 lat [4, 5, 8.]
Ruchome laboratorium na Marsie
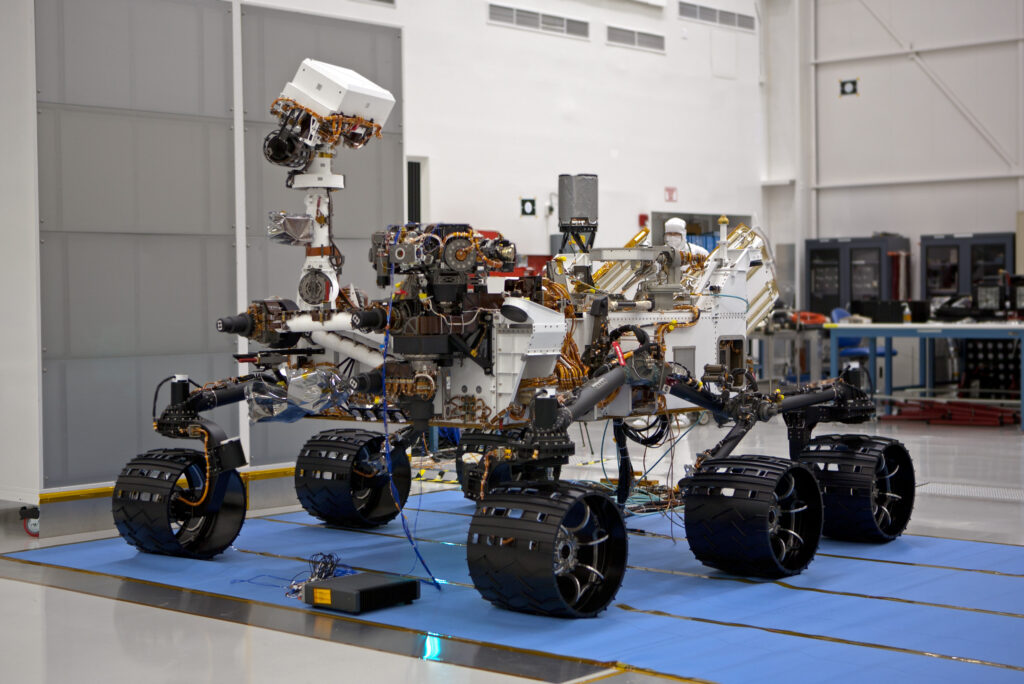
W 2012 roku miało miejsce lądowania na Marsie w kraterze Gale’a łazika Curiosity w ramach misji Mars Science Laboratory. Jego celem jest odpowiedzenie na fundamentalne pytania które trapi naukowców już od setek lat a mianowicie czy istnieje bądź czy istniało kiedyś życie na Marsie po przez zbadanie warunków panujących w przeszłości geologicznej Marsa szczególności miejsca i roli wody w jego historii.
Mars Science Laboratory przybył na Marsa dzięki innowacjom technologicznym, które przetestowały zupełnie nową metodę lądowania. Statek kosmiczny opadł na spadochronie, a następnie w ostatnich sekundach przed lądowaniem system lądowania wystrzelił rakiety, aby umożliwić mu zawisanie, podczas gdy linka opuszczała Curiosity na powierzchnię. Łazik wylądował na kołach, linka została odcięta, a system lądowania odleciał, by wylądować awaryjnie w bezpiecznej
Curiosity bada krater Gale i pozyskuje próbki skał, gleby i powietrza do analizy na pokładzie. Łazik wielkości samochodu jest tak wysoki jak koszykarz i wykorzystuje ramię o długości ponad 2 metrów, aby umieścić narzędzia blisko skał wybranych do badania. Duży rozmiar Curiosity pozwala na przenoszenie zaawansowanego zestawu 10 instrumentów naukowych.
Posiada narzędzia, w tym 17 kamer, laser do odparowywania i badania niewielkich, punktowych plamek skał na odległość oraz wiertło do zbierania sproszkowanych próbek skał. Poluje na specjalne skały, które powstały w wodzie i/lub mają oznaki organiczne. Tak liczne wyposażanie potrzebuje również efektywnego zasilania niestety ogniwa słoneczne nie dałyby rady nam tego zapewnić dlatego inżynierowie JPL wpadli na pomysł żeby łazik zasilić plutonem. MMRTG (Multi-Mission Radioisotope Thermoelectric Generator) czyli radioizotopowy termoelektryczny generator jest baterią ogniw sjądrowych, która z wysoką sprawnością zamienia energię jądrową w energię elektryczną. Całość składa się z dwóch głównych elementów: ze źródła energii termicznej, którym jest dwutlenek plutonu-238 i półprzewodnikowego zestawu termopary.
Curiosity niesie ze sobą największe, najbardziej zaawansowane instrumenty do badań naukowych, jakie kiedykolwiek wysłano na powierzchnię Marsa. Historia marsjańskiego klimatu i geologii zapisana jest w chemii i budowie skał i gleby. Curiosity odczytuje ten zapis, analizując sproszkowane próbki wywiercone ze skał. Mierzy również chemiczne odciski palców obecne w różnych skałach i glebach, aby określić ich skład i historię, zwłaszcza ich przeszłe interakcje z wodą [3 ,8 ,9].
Mars 2020
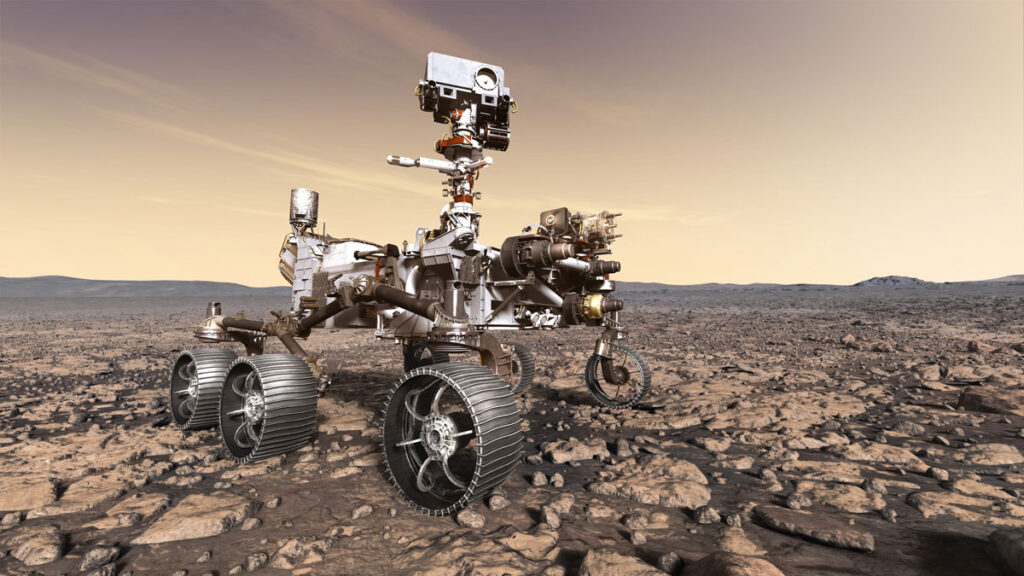
Co wspólnego mają bracia Wright oraz dron na Marsie? Wszyscy przeszli do historii dokonując niemożliwego. Zacznijmy od początku łazik Perseverance misji Mars 2020 jest częścią większego programu Mars Exploration Program NASA która ma za zadanie sprowadzenia próbek zebranych przez łazik Perseverance na Ziemie.
Robot eksplorujący czerwoną planetę z wyglądu niczym nie różni się od swojego starszego brata Curiosity. Perseverance ma za to inne urządzenie badawcze do prowadzenia naukowych, również różni się też innymi kołami ze względu na to że w Curiosity uległy zniszczeniu przez jeżdżenie po ostrych kamieniach.
Łazik planetarny Perseverance wyposażony w 7 urządzeń naukowo badawczych przede wszystkim w MOXIE ( ang. The Mars Oxygen ISRU Experiment ) czyli marsjański eksperyment produkcji tlenu technologia ta ma zbadać czy będzie możliwa produkcja tlenu z marsjańskiej atmosfery, a konkretnie z dwutlenku węgla. Dzięki tej misji projektanci przyszłych załogowych wypraw na Marsa będą mogli dowiedzieć się jak korzystać z marsjańskich zasobów do produkcji tlenu do oddychania ludzi i ewentualnie jako utleniacza do paliwa rakietowego.
Nasz łazik wylądował kraterze Jezero o złożonej historii geologicznej, który w odległej przeszłości mieścił jezioro. Łazik będzie wprowadzać wiertło, które może zebrać próbki rdzeniowe najbardziej obiecujących skał i gleb i odłożyć je na bok w „skrzynce” na powierzchni Marsa. Przyszła misja mogłaby potencjalnie zwrócić te próbki na Ziemię.
Pomogłoby to naukowcom badać próbki w laboratoriach za pomocą specjalnego sprzętu wielkości pomieszczenia, który byłby zbyt duży, aby zabrać go na Marsa.
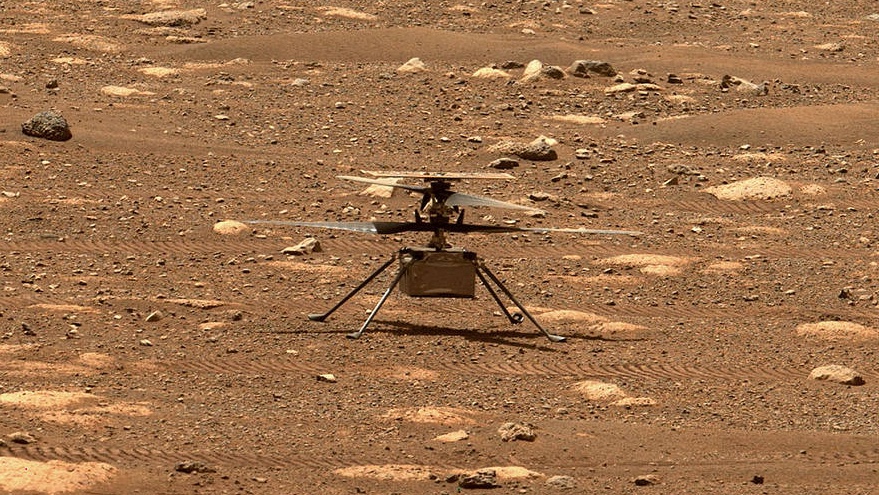
Poza zbieraniem próbek oraz innowacyjnym rozwiązaniom produkcji tlenu z atmosfery innej planety, łazik planetarny Perseverance miał jeszcze jedno zadanie bezpiecznie przetransportować Ingenuity zrobotyzowany wiropłat. Ingenuity, o którym była mowa na początku o odbył pierwszy w historii astronautyki lot z napędem na planecie innej niż Ziemia. Dron wzniósł się pięć razy, była to przede wszystkim demonstracja nowej technologii. Ingenuity ma sprawdzić, czy technologia pozwala bezpiecznie latać bezpiecznie na Marsie. Dron komunikuje się z łazikiem Perseverance w trakcie lotu oraz bezpośrednio po każdym lądowaniu. Śmigłowiec jest zaprojektowany tak, aby przekazywał obrazy „z lotu ptaka” w rozdzielczości około dziesięciokrotnie większej niż obrazy orbitalne, a także obrazy miejsc, które mogą być przesłonięte dla kamer łazika Perseverance [6, 8].
Kolebka łazików
No dobra, ale gdzie te wszystkie łaziki powstają oraz kto za to odpowiada? Jet Propulsion Laboratory (Laboratorium Napędu Odrzutowego) jedno z centrów badawczych NASA, które znajduje się w Pasadenie w stanie Kalifornia. To właśnie tu powstają wszystkie łaziki, sondy i lądowniki oraz są tworzone misje bezzałogowe z wykorzystaniem robotów. Pracownicy JPL obejmują zróżnicowaną populację naukowców, inżynierów, technologów, programistów, komunikatorów, projektantów, ekspertów ds. bezpieczeństwa, administratorów biznesowych i innych. Gdy naukowcy oraz inżynierowie projektują misje, oraz roboty, to właśnie technicy budują łazik. Praca techników lotniczych jest wykonywana ręcznie oraz bardzo trudna, ponieważ w dużej mierze to właśnie od nich zależy czy łazik poleć, czy też nie, jedna mała niedokręcona śrubka może skutkować katastrofą oraz stratą setek milionów dolarów.

Źródła:
[1] https://polsa.gov.pl/projekty/peraspera/robotyka-kosmiczna/
[2] https://mars.nasa.gov/mars-exploration/missions/pathfinder/
[3] https://mars.nasa.gov/mars-exploration/missions/mars-science-laboratory/
[4] https://mars.nasa.gov/mars-exploration/missions/mars-exploration-rovers/
[5] https://mars.nasa.gov/mars-exploration/missions/mars-exploration-rovers/
[6] https://mars.nasa.gov/mars-exploration/missions/mars2020/
[7] https://www.nasa.gov/stem-ed-resources/lunar-roving.html
[8] “PLANETARY ROVERS. Robotic Exploration of the Solar System” Alex Ellery
[9] “The Design and Engineering of CURIOSITY. How the Mars Rover Performs Its Job”. Emily Lakdawalla